Computergestütztes Verfahren zur Untersuchung von Hirnasymmetrien durch die lateralisierte Langzeitdarbietung visuellen Reizmaterials
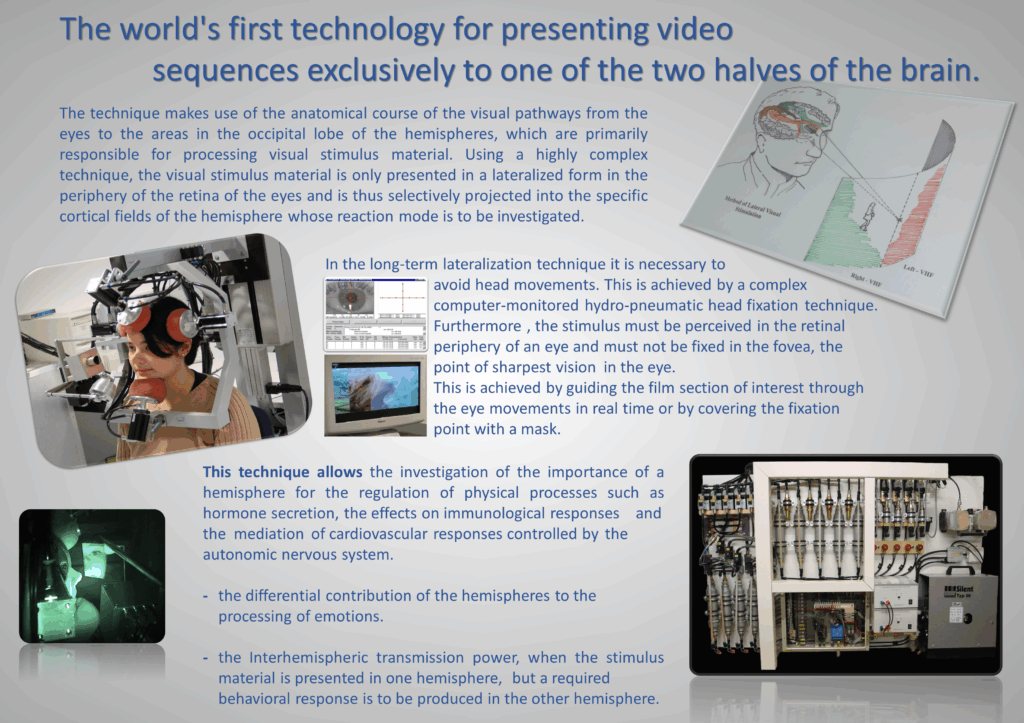
Das am Zentrum für Neuropsychologische Forschung entwickelte Verfahren ist eine komplette Neuentwicklung, aufbauend auf einem von Wittling (1984) entwickelten Verfahren, das in der Vergangenheit in zahlreichen Hirnasymmetrie-Untersuchungen Anwendung fand. Dieses bislang weltweit einzigartige Verfahren basiert auf dem anatomischen Verlauf der Sehbahn. Durch die spezielle Versuchstechnik wird visuelles Reizmaterial (Filme, Gedächtnismaterialien, komplexe kognitive Aufgabenstellungen usw.) jeweils ausschließlich in eine ganz bestimmte Hälfte der Netzhaut projiziert, und zwar unabhängig von vorkommenden Augenbewegungen. Auf diese Weise gelangt das Reizmaterial selektiv nur in die visuellen Rindenfelder der Hemisphäre, deren Reaktionsweise untersucht werden soll. Mit Hilfe dieser Versuchstechnik war es erstmals möglich geworden, die unterschiedliche Rolle der beiden Hirnseiten für die Regulation autonom-nervöser Körperprozesse zu untersuchen, wie z. B. Blutdruckregulation, Hormonausschüttung, Schlagvolumen, Pumpleistung und Kontraktionskraft des Herzens, sympathisch – parasympathische Balance usw. Unter Anwendungsaspekten eignet sich das Verfahren u. a. zum selektiven Training einer spezifischen Hemisphäre nach unilateralen Hirninfarkten, zum visuellen Kompensationstraining zur Reduzierung von Geischtsfelddefekten und zur Verbesserung von Wahrnehmungsleistungen in der Geischtsfeldperipherie sowie zur Untersuchung und Behandlung von Neglect-Symptomatik. Das zu verarbeitende visuelle Reizmaterial wird auf einem Video- oder Comupterbildschirm dargeboten. Während sich die Versuchsperson das Reizmaterial anschaut, wird ihre Augenbewegung kontinuierlich mit Hilfe einer Infrarot-CCD-Kamera registriert. Um Artefakte bei der Registrierung der Augenbewegung zu verhindern, werden Kopfbewegungen des Probanden mittels eines speziellen Fixierungssystems weitestgehend eliminiert. Mit Hilfe einer Software wird eine elektronische Maske erzeugt und Teilen des Videobildes überlagert. Die Maske wird den horizontalen Augenbewegungen des Probanden angepaßt. Sie bewegt sich in horizontaler Richtung in direkter Übereinstimmung mit der jeweiligen Blickfixierung des Probanden auf dem Bildschirm hin und her und verdeckt immer den vertikalen Meridian sowie eine der beiden Gesichtsfeldhälften. Auf diese Weise können die Informationen, unabhängig von der Art der vorkommenden Augenbewegungen, immer nur in der jeweils vom Versuchsleiter gewünschten Gesichtsfeldhälfte wahrgenommen werden. In einer neuen Variationsform der Technik wird auf die elektronische Maske verzichtet und der in einer Gesichtsfeldhälfte wahrzunehmende Bildausschnitt mit den Augenbewegungen mitgeführt, so dass der Reiz immer an der exakt gleichen Stelle der Netzhaut abgebildet wird (horizontal stabilisiertes Netzhautbild).
Die Technik besteht aus drei Hauptbestandteilen:
- einer Kopffixierungstechnik zur Reduzierung von Kopfbewegungen
- einer videookulographischen Technik zur Registrierung von Augenbewegungen und Pupillenreaktionen (Okulometrietechnik)
- einer PC-Steuersoftware zur Steuerung des Laterlisierungsprogramms
Kopffixierungstechnik Aufgabe der Kopffixierungstechnik ist die Vermeidung bzw. Reduzierung von Kopfbewegungen, die die Zuverlässigkeit der lateralisierten Reizdarbietung gefährden würden. Die gesamte Kopffixierungstechnik ist in eine Rahmenkonstruktion integriert. Diese Rahmenkonstruktionstechnik ist zum Ausgleich von Größenunterschieden der Probanden höhenverstellbar und wird von einem elektronisch gesteuerten Schrittmotor angetrieben. Die Rahmenkonstruktion dient zur Halterung von Pads, denen die eigentliche Aufgabe der Kopffixierung zukommt. Bei den Pads handelt es sich um evakuierbare Kunststoffhauben, die mit Formstoff gefüllt sind und eine exakte Abformung der Kopfpartien erlauben. Die Pads sind so angebracht, dass sie 4 Kopfregionen fixieren: Kinn, rechter und linker Temporalbereich und Okzipitalbereich. Die Anpassung der Pads an die Kopfform erfolgt durch ein Vakuumformverfahren. Die mit Formstoff gefüllten Pads werden zunächst durch ein hydropneumatisches Verfahren an die verschiedenen Kopfregionen angedrückt und passen sich den anatomischen Gegebenheiten der Kopfform exakt an. Daraufhin wird mittels einer Membranvakuumpumpe ein Vakuum erzeugt, wodurch der Formstoff hart wird, so dass er Kopfbewegungen verhindert. Da durch das Vakuumformverfahren die Form der Pads exakt der Kopfform entspricht, ist kein sehr hoher Anpressdruck erforderlich und es entsteht bei den Probanden generell kein Druckschmerz bei der Kopffixierung. Außerdem wird der auf den Kopf ausgeübte Druck permanent durch Drucksensoren registriert. Das Andrücken der Pads an den Kopf wird mittels Kolben vorgenommen, die an der Rahmenkonstruktion befestigt sind und an deren Vorderseite die Pads angeflanscht sind. Um eine fein abgestimmte und ruckfreie Bewegung der Kolben und damit eine exakt steuerbare Kraftaufbringung der Pads auf den Kopf zu gewährleisten, wurde ein hydro-pneumatisches Kreislaufsystem entwickelt. Mit der Pneumatik als Steuermedium ist es möglich, unter Verwendung von elektro-pneumatischen Druck-Regel-Ventilen eine stufenlose Druckveränderung zu erzeugen. Schon minimalste Druckveränderungen werden durch einen hoch präzisen Drucktransmitter erfasst, so dass bei Überschreitung einer zulässigen Druckgrenze automatisch programm-gesteuerte Sicherheitsmaßnahmen aktiviert werden. Insgesamt befinden sich mehrere unabhängig voneinander arbeitende Sicherheitsmechanismen im System. Die Koppelung zwischen pneumatischer und hydraulischer Seite erfolgt mit einem Druckgefäß als Druckwandler und Drucköl als Medium der Weiterleitung und Kraftaufbringung. Diese Art der Koppelung verursacht keine Reibungsverluste, da im Vergleich zu herkömmlichen Druckwandlern keine mechanischen Teile an der Wandlung beteiligt sind. Aufgrund der Tatsache, dass Hydraulikzylinder wegen ihrer massiven Bauweise und ihrem vorgesehenen Einsatzbereich für sehr hohe Drücke bis 350 bar bei den zur Kopffixierung angesteuerten Drücken von durchschnittlich nur 4 bar aufgrund ihrer hohen Reibung einen ausgeprägten sticks-slip-Effekt erzeugen würden, kommen statt Hydraulikzylindern die bauart- und anwendungsbedingt leichtgängigen Pneumatikzylinder zum Einsatz. Bei der Entwicklung der Software zur Steuerung der Apparatur wurde großen Wert auf eine einfache und intuitive Bedienbarkeit gelegt, wobei z. B. zu jedem Zeitpunkt nur die Bedienelemente frei geschaltet werden, die als nächstes Anwendung finden. Aufgabe der Steuerelektronik ist der Empfang binärer Steuersignale von der Parallelstelle des Computers und die unmittelbare Umsetzung dieser Signale zum Ansteuern der jeweiligen elektrischen oder elektronischen Komponenten. Um den Aufbau und die Erweiterung der Schaltung flexibel zu gestalten, wurde die Steuerelektronik aus verschiedenen Komponenten aufgebaut, die untereinander mit einem I2C-Bus verbunden sind.
Okulometrie Das Okulometer besteht im wesentlichen aus drei Teilen: einem Kamerakopf, einer Steuereinheit, die die Steuersignale für den CCD-Chip im Kamerakopf generiert und gleichzeitig das Kamerabild auswertet, sowie einem Netzteil. Für die notwendige Bildhelligkeit sorgt ein LED-Gitter, dessen Leuchtstärke über einen Helligkeitsregler eingestellt werden kann. Der Helligkeitsregler besteht aus einem Potentiometer, da die Vorwiderstände der LEDs in das Gitter integriert sind. Die optischen Elemente des Okulometers sind über Mikrometerschrauben in alle drei Raumrichtungen verschiebbar. Der Proband blickt durch den Infrarotspiegel auf den Monitor. Ein Infrarotspiegel ist durchlässig für sichtbares Licht und reflektiv für Infrarotlicht. Von schräg unten wird das Auge von IR-Leuchtdioden beleuchtet, um die notwendige Helligkeit für die Kamera zu erreichen. Vor der Kameralinse ist ein Filter angebracht, der nur Infrarotlicht passieren lässt. Damit ist der Infratrotspiegel für die Kamera voll reflektiv und für die Versuchsperson durchsichtig. Vor den Leuchtdioden befindet sich ein Diffusor, damit diese nicht scharf auf die Netzhaut abgebildet werden können. Der Kamerakopf betrachtet das Auge von seitlich unten, und zwar über den Infrarotspiegel. Die Beobachtung von etwas unterhalb ist gewählt worden, da bei den meisten Versuchspersonen die Wimpern des Oberlides leicht nach unten hängen. Auf diese Weise wird das Kamerabild der Pupille weniger stark von Wimpern überdeckt. Die Elektronik des Kamerakopfes besteht im wesentlichen aus einem CCD-Chip sowie diversen Treiberbausteinen. Der CCD-Sensor hat eine Auflösung von 336×244 Pixel. Die Pixel wiederum sind quadratisch mit einer Kantenlänge von 10 µm. Das Empfindlichkeitsmaximum liegt bei einer Wellenlänge von 750 nm. Die Betriebsbedingungen des Okulometers liegen also im nahen Infratrotbereich. Das vereinfachte Blockschaltbild der Steuereinheit ist in der folgenden Abbildung dargestellt, wobei unter anderem die Treiber für die CCD-Signale ebenso wie für die serielle Schnittstelle weggelassen sind. In dem Schaltbild sind drei programmierbare Bausteine zu erkennen. Ein CPLD erzeugt während der Messung die Taktsignale für die Kamera, den AD-Wandler und für die Berechnung der Pupillenparameter. Er bestimmt auch die Pupillenränder und die Ränder des Lichtreflexes durch Vergleich der Grauwerte des Kamerabildes mit vordefinierten Schwellenwerten. Das Programm des digitalen Signalprozessors wird nach dem Einschalten aus einem EPROM gelesen. Der PIC Mikrocontroller übernimmt die Kommunikation mit dem PC sowie die Integration der Kameraparameter mit den digitalen und analogen Eingängen des Okulometers.

Die durch den AD-Wandler eingelesenen Grauwerte schreibt der CPLD nach dem Schwellwertvergleich direkt in den Speicher des DSP. Die Taktsignale für die Kamera werden so generiert, das immer zwei aufeinander folgende Zeilen summiert werden. Damit erhält man in Spaltenrichtung nur noch die Hälfte der möglichen Auflösung, und die Anzahl der Zeilen halbiert sich zu 122 Zeilen. Von diesen werden die mittleren 100 Zeilen ausgewertet. Von den Spalten werden 300 Zeilen ausgewertet. Man erhält also eine Auflösung von 300×100 Punkten. Ebenfalls aufgrund der Taktsignale wird abwechselnd der CCD-Chip 3.1 ms belichtet, und ebenso lang werden die Grauwerte in den CPLD übertragen. Man erhält also eine Zyklusdauer von 6.2 ms, was zu einer Bildrate von 161 Hz führt. Während der Belichtung wird aus den Rändern die Blickrichtung berechnet. Der DSP übernimmt dann die Berechnung der Pupillenparameter aus den Flankenpositionen. Die Pupillenparameter sind der Pupillenmittelpunkt und der Pupillenradius. Nach mehrstufigen Fehlerkorrekturen sendet der Mikrocontroller die Bilddaten weiter an den PC und fügt in den Datenstrom noch die analogen und digitalen Eingänge ein. Die Messergebnisse des Okulometers sind immer Rohwerte, die in einem Kalibrierungsdurchgang auf die tatsächliche Blickrichtung des Probanden justiert werden.
PC-Steuersoftware Das Lateralisierungsprogramm bildet die Integrationsinstanz der Lateralisierungsapparatur. Von hier wird der Bildschirm gesteuert und mit den Messwerten des Okulometers in Beziehung gesetzt. Die Messwerte können Blickrichtungen sein oder analoge Signale, die über den AD-Wandler des Okulomters laufen. Das Programm misch auch die Bildströme für die Darbietung. Bildströme können Einzelbilder oder Videos sein, wobei jede Kombination von Einzelbild und Video möglich ist. Die Informationen zum Mischen der Bildströme liefert das Okulometer über die serielle Schnittstelle. Im Lateralisierungsmodus wird links oder rechts vom vertikalen Meridian der eine Bildstorm dargestellt, während auf der jeweils anderen Seite des vertikalen Meridians der zweite Bildstrom dargestellt wird. Dabei ist ein beliebiger offset wählbar. Es ist aber auch ein Modus implementiert, bei dem ein Ausschnitt beliebiger Größe des einen Bildstromes mit den Blicken mitgeführt werden kann, während im Hintergrund der andere Bildstrom dargestellt werden kann. Damit ist ein moving-mask-Paradigma sowie eine Bildstabilisierung realisierbar. Die Mitführung eines Ausschnittes über einen Hintergrund funktioniert ausdrücklich auch mit Videos. Die Darbietungszeit eines Einzelbildes oder Videos kann beliebig lang sein. Sie kann per Taste, die auch als Reaktionszeittaste genutzt werden kann, von der Versuchsperson beendet bzw. weitergeschaltet werden. Die Darbietungszeit kann so kurz gewählt werden, dass der Monitor nur ein einziges Mal vom Elektronenstrahl mit dem entsprechenden Bild aufgebaut wird. Der Monitor der Lateralisierungsapparatur wird mit einer wählbaren Bildwiederholfrequenz angesteuert, die in der Regel 180 Hz beträgt. Das bedeutet, dass die Grenze zwischen den beiden Bildströmen alle 5.6 ms an die Blickrichtung angepasst werden kann. Der eigentliche Bildinhalt muss sich dabei nicht ändern. Des weiteren erlaubt die Lateralisierungstechnik Reaktionszeiten zu messen. Die Messung startet mit Beginn der Darbietung eines Bildes oder Videos und endet mit einem Tastendruck der Versuchsperson. Prinzipiell kann mit jedem neuen Bild oder neuem Video eine neue Reaktionszeitmessung gestartet werden.